Hi there,
Recently I purchased the RPM Sensor, I will be grateful if you help me to understand the behavior of the Governor and RPM Meter data.
I have to say that the first test I made was without main or tail blades in my backyard for safety.
Settings are:
Sensing Divider = 2 (two active magnets)
Gear Ratio = 129 corona /15 pinion = 8,60
Max Head Speed = 2000 RPM (OS 55HZ - Motor Max RPM according specs = 17000, so Max RPM Head Speed should not go over 17000/8,60 ~ 2000 RPM)
Servo Freq. = 200Hz. Connected to AUX port
Throttle Range properly set
The other settings are all by default
The Spirit was connected directly with the USB connector and also on a second try via Bluetooth using the Android APP, same readings.
The Governor engage well once I go over 50% of throttle curve and below this percentage the requested RPM remains 0, so that's great.
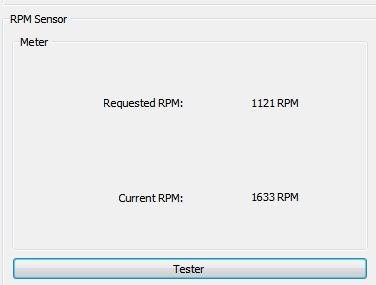
The problem is that once I go over 50%, the requested RPM are way out of the real RPM. Why do I say "real"? because I have a Tachometer and the rotation speed is almost exactly to the Spirit Current RPM value, so sensor reading and data received by Spirit is perfect. Some examples (percentage and values are aprox.):
56% Throttle Curve - Requested = 1121 Current = 1633
75% Throttle Curve - Requested = 1494 Current = 1900
85% Throttle Curve - Requested = 1709 Current = 2100!!
Noticeable smooth spool up and down between curves (flat curves).
Two captures as an example:
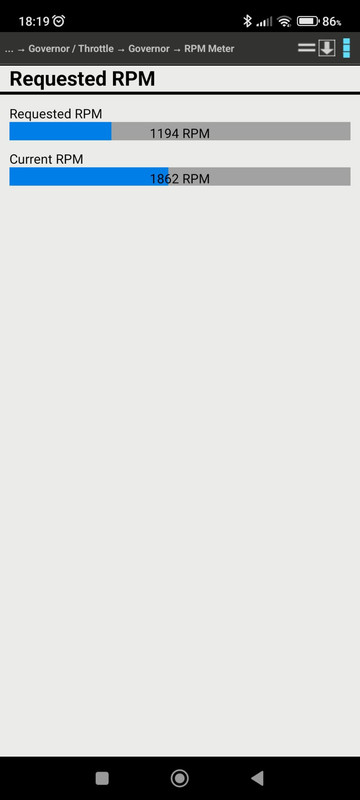
I know that without blades the readings could be not very accurate as there is almost no load, but I expected the throttle servo to close the carburetor trying to reach the requested value automatically, but it does not happen. May be I miss something, but I don't know what else I can check.
What do you think the problem might be?
Thank you.

